
RUIDE RENO2 RTK GNSS
- Aug 25, 2024
- 7 min read
Legutóbbi cikkemben említettem, hogy egyre nehezebb a GNSS vevőkről érdekfeszítő cikkeket írni.
Talán nagy csodák nincsenek is már, meglehet a műholdas pozíció meghatározási technológia elzúgta a maga műszaki forradalmait.
Persze, mindig jönnek újabb, érzékenyebb antennák, az ionoszféra hatásait, vagy a multi path-t jobban szűrő, modellező algoritmusok, amik mindig tovább finomítják majd a számításokat, de az észlelés fizikai peremfeltételeit áthágni ezek sem fogják tudni.
A GNSS technológia háza táján fejlesztett látványos kiegészítő megoldások tehát a hagyományosnak mondható helymeghatározás pontosságára nincsenek hatással. Ugyanakkor elvitathatatlanul nagyban könnyítik meg a terepi munkavégzést, lehetővé teszik a majdnem elérhetetlen részletek kényelmes rögzítését.
Ilyen volt először a dőlés kompenzátor, majd később az arra támaszkodó lézeres távmérési mód, mely a külpontos mérést - és egyes gyártóknál még a kitűzést is - támogatja.
Emellett folyamatosan jelentek – jelennek a különböző képalkotó megoldások.
Kis jóindulattal ide sorolhatjuk a számos gyártónál nagyon régóta elérhető „Fotó és vázlat” megoldást, mely során a vezérlővel lefotózzuk a mért pont közvetlen környezetét és szabadkézi rajzot, pontszámozást, koordináta információkat, stb. helyezünk el a képre a terepi szoftverben, egyfajta képes manuálét készítve.
Ezen jelentősen túlmutat a valós idejű AR (Augmented Reality, azaz kiterjesztett valóság) alkalmazása.
Ebben az esetben eleinte a vezérlők hátlapi, majd később már a GNSS fejezetekbe integrált kamera-kamerák folyamatos video-stream képében kerültek megjelenítésre a kitűzési méretek, navigációs nyilak, stb. a kezelőegység kijelzőjén, így támogatva a terepi munkavégzést.
Persze, ha azt gondolnánk, ezek új keletű dolgok, jusson eszünkbe, hogy a JAVAD pl. már 2011-ben alkalmazta ezt a Triumph-LS, majd VS műszereiben.
A Trimble éppen 10 évvel ezelőtt rukkolt elő a 12(!) kamerás V10 un. Imaging Roverrel, mely nem csak RTK GNSS-t, de akár Robot mérőállomás prizmaoldalt is ki tudott szolgálni, georeferált, mérhető, barangolható panorámát létrehozva a mérési környezetéről.
Szintén magát a fotogrammetriát hozta be a képbe 2020 augusztusában a Leica is.
A fejezetbe integrált előre néző kamera képeiről a GNSS-szel el nem érhető pontok határozhatók meg.Itt a „GPS-t akarok!” hasábjain pedig 2022-ben kerül bemutatásra a HiTarget vRTK hasonló koncepcióval.
Úgy látszik, most RUIDE-on a sor, hogy felvegye és tovább vigye ezt a fonalat a méréstechnikában, mégpedig a RENO2 RTK GNSS vevőjével, mely egyébként a 2021-ben megjelent profi RENO1 idei trónkövetelője.
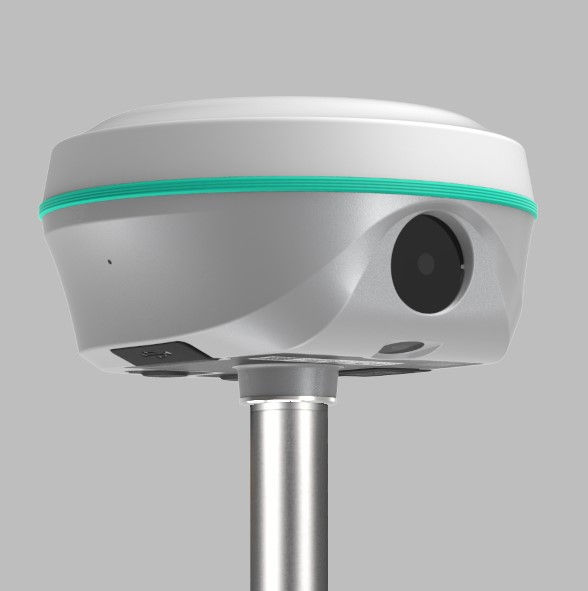
A 860 grammos, szürke-fehér színű, ízléses formavilágú műszer a megszokott, kisebb fajta műszerdobozban érkezett.
Színösszeállításában az oldalán végig futó vékony RUIDE-mentazöld védő gumicsík utal a kínai gyártóra.
Homlokpanelén nagy méretű bekapcsológomb, a szokványos négy információs LED-del (Bluetooth kapcsolat, adatátvitel, műholdvétel, akkuállapot) körülvéve. Az átellenes oldalon található egy 8 MPx-es kamera, melynek funkciója kettős: egyrészt, az un. vizuális pozicionálás, másrészt a távoli kitűzés AR navigációja. Alatta található lefelé néző párja, mely szintén a közeli AR kitűzést támogatja, 2 MPx-es felbontással.
Valós idejű korrekciós adatátvitelhez a vevő rendelkezik integrált 4G modemmel, valamint Tx-Rx URH rádióval is.
Lefelé fordítva a vevőt, alján gumifülek alatt rá is lelünk a nanoSIM foglalatra, illetve a TNC antenna csatlakozóra. De találunk még itt egy LEMO konnektort külső erőforrás csatoláshoz, illetve C-típusú USB-t.
Utóbbin keresztül adatot tölthetünk le a fejezetből, illetve tölthetjük a 6 800 mAh-s belső telepet. Ennek töltöttségi állapotáról a bekapcsológomb rövid megnyomásával a vevő alján lévő információs LED soron tájékozódhatunk.
Kifejezetten hasznos kis funkció!
Egyébként az akku egy töltéssel rover módban 12, URH bázis módban 10, statikus módban 16 órányi munkavégzést biztosít.
A vevő oldalán van még hangszóró is, melyből folyton státuszjelentések jönnek. Megmondom őszintén én kikapcsoltam ezt az opciót, mert a végére már kezdett kicsit idegesíteni.
Néhány szót a vevő figyelemre méltó belbecseiről is.
A 134 mm x 79 mm-es, robosztus magnézium-alumínium ötvözetű korpusz IP68 por- és vízállósági besorolású. A multi-frekvenciás, 1698 csatornás sinoGNSS S805 lapka lehetővé teszi a GPS/GLO/GAL/BDS, illetve – annak, aki a Világ másik oldalára vetődne – az IRNSS és QZSS jelvételt.
A gyártói közlés szerint valamikor a jövőben L-Band készség is várható, szoftveres up-grade formájában.
A vevő természetesen nagy érzékenységű IMU-val rendelkezik, melynek nem csak a hagyományos döntött antennarudas mérésnél, hanem a képalkotás támogatásában is fontos szerepe van.
Érdekesség továbbá a fejezetbe integrált hőmérőegység is, mely intelligens hőmérséklet monitoringot és -szabályzást tesz lehetővé a műszerházon belül.
A RENO2 Bluetooth-on és WiFi-vel is képes csatlakozni a vezérlőegységhez. Ez utóbbi elengedhetetlen a képalkotó módban való alkalmazáshoz. A statikus észlelést, valamint az észlelések során készített mérőképek tárolását belső, 16 GB SSD memória teszi lehetővé.
Néhány szó a tesztalanyhoz kapott terepi vezérlőről is.
Az OUKITEL RT3 egy elpusztíthatatlanul strapabíró, katonai szabványnak megfelelő, IP68 besorolású tablet. 8”-os, karcolásálló, 400 nites kijelzője ellenfényben is jól látható, polárszűrős napszemüvegben is szemlélhető.
Operációs rendszere Android 12, amin a 8 magos 2GHz-es processzornak és a 4 GB RAM-nak köszönhetően minden alkalmazás szinte válaszidő nélkül elfut.
Egy feltöltéssel 5 150 mAh-s beépített akkumulátora GNSS vezérlőként >9 óra munkaidőt biztosít.
A vezeték nélküli adatátvitelt a dualSIM-es adatátviteli modem, a Bluetooth, WiFi képviselni, a vezetékest az USB-C konnektor.
Külön érdekesség, hogy integrált GPS/GLO/GAL/BDS L1 vevőként is funkcionál.
No de térjünk át a tesztmérésekre!
Nyilván az egészet a fejezet előre néző kamera képalkotására és a vizuális pozícionálásra hegyeztem ki.
Mint mindig, most is a CORRIGO CORS szolgáltatta a multi-konstellációs- és frekvenciás valós idejű korrekciókat a teszt alatt. Ez az országos lefedettségű, valódi VRS megoldás azért GNSS észlelések szempontjából kitakartabb mérési helyszíneken is komoly biztonságérzetet és nem mellesleg biztos FIX megoldást ad!
A RENO2 terepi szoftvere a RUIDE RTK GO alkalmazás.
Logikájában, felépítésében, megjelenésében tipikusa Android operációs rendszerre írt kínai geodéziai alkalmazás. Így, aki pl., SurPAD-del, DiMAP-pel, vagy méRTéK-kel dolgozik nem jön zavarba a kezelésétől.
Amennyiben a „Fotogrammetria” mérés módban akarunk dolgozni, a vezérlőt és a GNSS-t WiFi-n keresztül kell csatlakoztatni.
Elindítva ezt az észlelési módszert egy legördülő menüből három-féle lehetőségből választhatunk: (álló)képek készítése, videófelvétel készítése, illetve felvételezés modell utó-kiértékeléshez.
Mindhárom módszernél nagyon fontos a mérési helyzetünk tényleges FIX pozíciója és az inicializált IMU. Ha ezek hiányoznak a mérőrendszer letiltja a funkciót.
Bármelyiket is választjuk, egy a videostream-en megjelenő négyszöggel kell „célozni”, illetve azt a mérendő célponton tartani.
Egy objektum sima fényképezéséhez legalább 5 felvételt kell készíteni a GNSS roverünkkel, kvázi statikus antenna helyzetekből.
Ez a megoldás könnyebbé teszi precíz célzást és bizonyára a képkészítés szempontjából is biztosabb feltételeket teremt. Meglátásom szerint kisebb objektumok, el nem érhető részleteinek fókuszáltabb mérésére szolgáló megoldás.
Ennél mindenképpen gyorsabb és dinamikusabb módszer a videófelvétel készítése. Jó fényviszonyok mellett sétatempóval kell elhaladni a felmérni kívánt objektum előtt, a rovert felé fordítva, a célzó négyszöget a fontos részleteken tartva.
Ennél a fent vázolt két vizuális mérési megoldásnál a képkészítést követően a szoftver rákérdez, hogy szeretnénk-e megkezdeni a feldolgozást. Ha nem, kilépés nélkül, tetszőlegesen további képalkotói „adatcsomagokat” hozhatunk létre.
Ha bármikor a feldolgozás mellett döntünk, némi processzoridő után megjelennek az egyéni fotózásból, illetve videóból kivágott képek.
Legalább hármon kell ugyanazt a pontot megjelölni a sugárnyaláb metszés számításához.
De mi van a háttérben?
Úgy tűnhet terepi feldolgozás történik, ami csak félig igaz. Egész pontosan a RENO2 fejezet „leküldi” a vezérlőbe a képeket, ami aztán mobilneten „fellövi” azokat a felhőbe. A tényleges számítás valójában ott zajlik, majd az eredmények ismételten letöltődnek a vezérlőbe.
Azt tapasztaltam, hogy 40 db képnél, vagy a felett azért nem mindig sikerült elsőre az összeillesztés.
Lehetséges, hogy ennek a magyarázata nem a számítási kapacitásban, hanem a mobilnet sávszélességben keresendő.
Vizsgálódásaim során egyébként én a videós észlelést, azaz dinamikus módszert alkalmaztam.
Normál, IMU-s mérési módban végig mértem egy magas kőalapú kerítés fejmagasságban lévő kerítésoszlopait, majd ugyanitt végig haladtam a kerítés mentén kb. 2-2.5 méteres, ezt követően újabb mérési szettként kb. 5-7 méteres távolságban.
A közelebbi mérésnél a nagy látószög miatt körülményesebb volt az irányzás, ugyanakkor a két külön távolságból származó eredmények nem tértek el egymástól kiugróan.
A hagyományos RTK-val kontrollként bemért, illetve a videós képalkotásból származó pozíciók javarészt < 5 cm koordinátakülönbséget mutatnak (sőt egy kivételévek < 4cm).
Egy kerítés talppont ugrott ki 7 cm-rel, aminél viszont gyanús, hogy maga a hagyományos kontrollmérés a ludas, mivel a képekről levett pontok meg szépen ülnek egymáson.
Ugyanez volt a helyzet egy direkt kitakartként kiválasztott sarokponttal is. Ennek hagyományos megmérése többszöri nekifutásra sikerült csak, éppen a kényes helyzete miatt. Egyébként, pontosan az ilyenekre van kifejlesztve ez a képalkotással kombinált mérési módszer!
A terepen képekről lekérdezett és számított pontkoordináták szépen bekerülnek a koordinátalistába, a hagyományos mérési módszerrel mértek mellé. Természetesen, dokumentálásukban eltérés lesz, ami viszont egy földhivatali leadás esetén vethet(ne) fel kérdéseket, ahol azért lássuk be, egy-egy korszerű módszer alkalmazásának gondolata még nem feltétlenül vetette meg a lábát…
A harmadik fotogrammetriai módszer tekinthető offline-nak.
Itt szintén mozgás közben készítünk videót az objektumról, ám a fejezetben tárolt képeket nem terepen fogjuk feldolgozni.
A mérőrendszerhez jár egy irodai feldolgozó szoftver, a RUIDE Geo DataLab.
Ez egy moduláris GNSS észleléseket feldolgozó, átfogó szoftverrendszer, mely esetünkben a RENO2 fejezetből USB-C-n letöltött mérőképekből állít elő fotómodellt.
A modell abszolút helyzete adott a képek idevágó EXIF metaadataiból, azaz képkészítés geodéziai pontosságú földrajzi pozíciójából.A feldolgozás teljesen automatikus, mikor lefut, a 3D modell barangolható, mérhető, természetesen arról további koordináták vehetők le, pl. az el nem érhető részletekről.
Mivel ugyanazt a helyszínt ezzel az észlelési módszerrel is végig szaladtam, így további összehasonlítást tudtam végezni. Itt a fényképezési távolság 7-8 méter volt, emellett nem egy vonalban, csak a kerítés mentén történt a videózás, hanem mivel kifejezetten a kerítés sarokra voltam kíváncsi, igyekeztem azt „körbejárni”. Így be is fordultam a kereszteződésben, hogy a sarok minél több szögből leképződjön.
Természetesen, a RUIDE Geo DataLab egyelőre nem ismeri az EOV-t, így a benne lekérdezett WGS koordinátákat az EHTv2.0 netes felületen számoltam át.
Összevetve a hagyományos RTK-val, illetve a fotózásból származókkal, a koordinátaeltérések 5-7 cm-t mutattak. Ezt kifejezetten jónak ítélem és úgy gondolom, hogy némi rutint szerezve ebben az észlelési módban, illetve 3D modell irodai feldolgozásban mindenképpen javítani lehet a végeredményen.
Persze, felmerül a kérdés, milyen projektben alkalmazzuk. Egy depónia földtömegszámításához már ez is kiválónak mondható!
A képek közé betettem a mérési eredményeket, szíves átböngészésre.
A Geo DatLab-ból kinyerhető a pontfelhő és az elkészült felületmodell is. Így, ha valaki rendelkezik egyéb szoftverrel, akár egy ingyenes CloudCompare-rel, vagy MeshLab-bel is, az könnyedén tovább is tudja gondolni a feldolgozást!
Rengeteg mindent el lehetne még mondani a RUIDE RENO2-ről.
Nagyon jól átgondolt, terepen nagyon jól használható, kis tömegű, nagy tudású, strapabíró mérőrendszer, a korrekciós adatátvitel legfontosabb eszközeivel.
A képalkotáshoz, a képek jó szemléléséhez, a közös pontok jelöléséhez tényleg a nagy képernyő dukál, pl. a kipróbált RT3 tableté.
Tudom, hogy számos oldalt meg tudnék még tölteni a műszerről, ám úgy a teszt során, mint jelen cikkben is leginkább a fotogrammetriai észlelés kibontására koncentráltam. Remélem, ez sikerült!
Éppen ezért nem is ragozom tovább és megköszönöm mindazoknak, akik eljutottak velem ide, a hosszú publikáció végére.
Emellett természetesen ezúttal is köszönettel tartozom a FORGEO Kft.-nek és Forgó Zoltán Úrnak, aki a RUIDE RENO2-t kipróbálásra a rendelkezésemre bocsátotta.
Képgaléria:

































Comments