
FEIMA Robotics SLAM100 kéziszkenner
- May 25, 2023
- 7 min read
Updated: Jul 20, 2025

Első cikkem a kézi szkennerek témakörében a Geodézia & Kartográfia Magazin 74. évfolyam, 2022/1. számában jelent meg, a GeoSLAM ZEB HORIZON-ról. Akkor ott röviden bemutattam a technológia háttértörténetét.
Mivel a „GPS-t akarok!”-on ezzel párhuzamosan akkor nem publikáltam a mérőrendszerről, úgy illik kezdenem, hogy a módszer történeti áttekintését itt kifejtsem.
A SLAM rövidítés a Simultaneous Localization and Mapping (azaz, az egyidejű helymeghatározás és térképezés) angol szavak kezdőbetűiből származik.
A módszer megalkotása a ’80-90-es évekre tehető. A mérnököknek a robotika területén akkoriban komoly fejtörést okozott, hogy hogyan lehetne vezérelni a gyárakban alkalmazott autonóm módon mozgó járműveket úgy, hogy azok ne ütközzenek olyan objektumokba, mint pl., csarnok falak, oszlopok, üzemi berendezések, emberi személyzet, vagy akár más robotok.
Beltérben a műholdas helymeghatározásra természetesen nem volt lehetőség. Így aztán kifejlesztettek egy olyan digitális utasításkészletet, mely egyidejűleg képes feltérképezni maga körül a teret és navigálni is abban. Így született meg a SLAM algoritmus.
A speciális érzékelők vizuális- (pl.: kameraképek), nem-vizuális mért adatokat (pl.: szonárok, RADAR, LiDAR adatok), valamint alapvető helyzetinformációkat (pl.: IMU adatok) is szolgáltathatnak a SLAM megoldásban.
A mérőrendszer ezekből az információkból egy "legjobb becslést" számít saját helyzetére vonatkozóan a térben. Ebben való elmozdulásával, saját inercia rendszerében minden egyéb környezeti tényező (fal, oszlop, üzemi egység, stb.) mozogni fog, így ezeknek az új pozícióinformációknak segítségével a SLAM algoritmus automatikusan tovább tudja finomítani helyzeti becslését.
A brit GeoSLAM, illetve jogelődje 1999-ben kezdett foglalkozni a technológiával. Egy új, kifejezetten térképezésre optimalizált algoritmussal megalkotta a Világ első 3D kézi szkennerét, ami 2013-ban debütált a nagyközönség előtt.
Természetesen, az azóta eltelt évtizedben több megoldás is napvilágot látott úgy náluk, mint a felzárkózni kezdő versenytársaknál. Az elmúlt 1-2 évben pedig ugrásszerűen megnőtt a kézi mobil térképező rendszermegoldások száma a piacon.
Nem is csoda: a SLAM maga dinamikus, ugyanakkor kényelmes adatgyűjtési módszert ígér.
De vajon mire elég a mérési megbízhatósága, milyen feladatokban alkalmazható jól? Ennek próbáltunk utánajárni az UVATERV Zrt. Térszkennelési és BIM Szakosztályán, a FORGEO Kft. által forgalmazott FEIMA Robotics SLAM100 kézi mobil térképező rendszer kipróbálásával.
A műszer dizájnja nem egyedi a piacon, több gyártónál fellelhető ez a formavilág. Kiemelve az egyébként kis méretű, duplafenekű hordládából az tűnik fel, hogy a korábbi modellekhez képest sehol egy kábel, külső telep, vagy adatrögzítő. Valóban, ez egy teljesen kompakt mérőrendszer. A négy darab 3 350 mAh-s Li-Ion rúdakkumulátorokat, a szekrénytáras kézifegyverek mintájára, alulról kell betölteni a műszer nyelébe. Egy szettel 2.5-3 órát üzemel el a szkenner. A csomag része egy LCD kijelzős hálózati töltő, melyhez szivargyújtós autós kiegészítő is jár.
Az adatrögzítés cserélhető SD kártyára történik. Ehhez egy SD – USB 3.0 átalakítót kapunk, így kártyaolvasó nélkül is megoldható a gyors adatátvitel.
A korpusz kialakítása ergonomikus, ugyanakkor kifejezett szépnek mondható. Az elején forgó szkennerfej látómezője 360° x 270°. Szkennelési sebessége 320 000 pt/mp, hatótávolsága pedig 120 m.
Alatta található egy hármas kamera melyek össz-látószöge 200° x 100°. Ezek vannak hivatva valódi színeket biztosítani az előálló pontfelhő számára. A szkenner jobb oldalán található a már említett SD kártya slotja, egy USB-C konnektor, illetve egy LEMO csatlakozó. Az USB-C-n keresztül szólítható meg a műszer belső memóriája, naplófájl letöltésekhez, kábeles firmware frissítésekhez. A LEMO a külső energiaellátást, illetve egyéb eszközökkel való kapcsolatot biztosítja.
A másik oldalon egy aprócska bekapcsoló gomb található egy státusz LED-del kiegészítve. A gomb hosszú megnyomásával ki– bekapcsolhatjuk az eszközt, rövid megnyomásával indíthatunk, illetve zárhatunk le mérést. Kritikaként felrovom a tervezőknek, hogy a kapcsolót a műszer bal oldalának sarkába találták ki. Történt ugyanis, hogy negyedóra szkennelés után, elfáradva csak a jobbommal tartani, menet közben a bal kezemmel alátámasztottam a műszert. Ezzel az ügyetlen mozdulattal be is nyomtam a gombot, mely így szépen lezárta a munkafájlt és indított egy másikat. A mérőegység hátoldalán furatok találhatók. Utánajárva kicsit a neten, találtam olyan megoldást, ahol ezekre konzolt rögzítettek, amibe aprócska, integrált RTK GNSS vevő került, kábeles kapcsolattal csatlakozva a SLAM100-hoz.
A kézi fogantyú is eltávolítható a szkenner aljáról s az alatta található furatok segítségével a mérőegység pl. drónra, egyéb hordozóra, esetleg teleszkópos kiemelőre is átszerelhető.
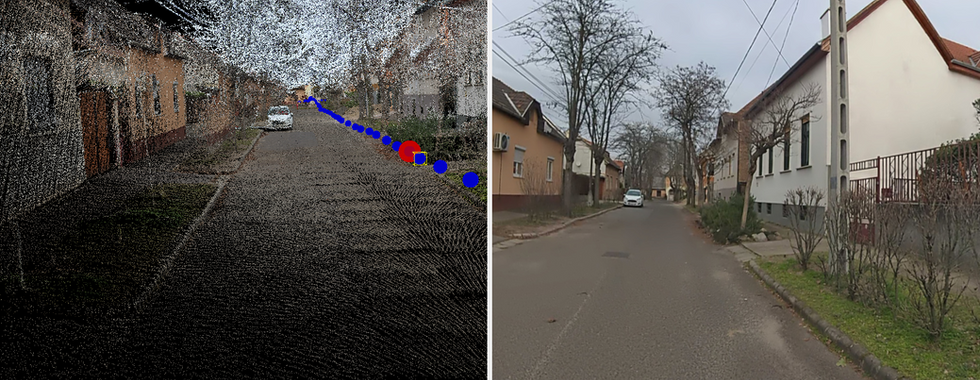
Maga az eszköz kezelés éppen olyan egyszerű és dinamikus, mint maga terepi észlelés. Bármilyen WiFi képes, Android operációs rendszerű okos kütyüvel végrehajtható. A vezérlés a díjmentes SLAM GO szoftverrel valósul meg. Ebben történik a mérés indítása, leállítása, illetve ez teszi láthatóvá valós időben, 2D v. 3D nézetben a körülöttünk kialakuló pontfelhőt, illetve abban a saját trajektóriánkat, azaz bejárt útvonalunkat. Azt vettük észre, hogy észlelés közben nem érdemes nagyon váltogatni a megjelenítést, vágósíkkal manipulálni, vagy forgatni a pontfelhő képét a telefon kijelzőjén. Egyrészt nehézkes művelet fél kézzel menet közben, másrészt az alapértelmezett nézet elégséges információt nyújt.
A mérést egy 60 másodperces mozdulatlan inicializálás előzi meg, mely során a szkennernek nyugalmi állapotban kell lennie, illetve látómezőjében lehetőleg nem szabad objektumnak mozogni. Amennyiben szeretnénk egy félpanoráma képet készíteni a startpontunk környékéről egyfajta fotódokumentációként, a mérés megkezdésekor erre is van lehetőségünk. Az alkalmazás visszaszámolja az egy percet, majd indulhat is a mérés. Ez nem áll másból, mint hogy kb. mellkas magasságban tartva a SLAM100-t, kényelmes sétatempóban bebarangoljuk a felmérendő objektumot. Csinálhatunk záródó hurkokat, de igazából nem feltétele a megbízható mérésnek, hogy visszatérjünk a kiindulási pontra. Ha nem tesszük, a feldolgozáskor az irodai szoftverben ezt az opciót be kell kattintani.
A műszerfogantyú aljára négy csavarral egy könnyű műanyag talp rögzíthető, mellyel a szkenner lejelölt kontrollpontokra helyezhető mérés során, így utófeldolgozáskor georeferálható a mérésünk. Ha így használjuk a műszerünket, az alappont elfoglalásakor rá kell koppintani a képernyőn a GCP gombra a „Ground Control Point” rögzítéséhez, melyhez aztán az utófeldolgozáskor helyi koordinátákat adhatunk be. Ezt a speciális talpat mi illesztési igénytől függetlenül minden egyes mérésnél felszereltük, mivel az induló inicializálást kényelmesebb és biztonságosabb a műszert talpon tartva végig várni.
Tesztelés során dolgoztunk kül- és beltérben egyaránt. Hogy milyen „nehéz” a SLAM100 a maga kb. 1.6 kg-jával, az fáklyaként hordozva terepen, olyan negyedóra múlva derül ki. Addigra az ember azért már kezdi megérezni a karját. Ugyanakkor ennyi időbe külterületi észleléskor bőven belefér egy kb. 480-500 méter kerületű tömb körbemérése.
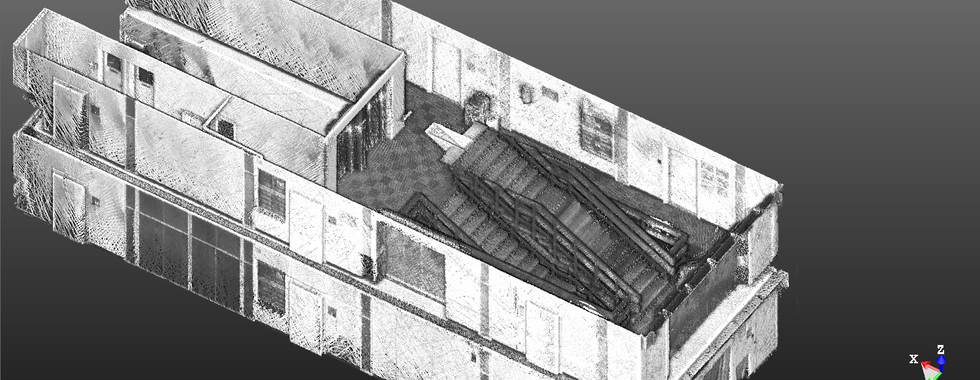
Beltérben ez 3-4 irodaházi szintet jelent. Ilyen jellegű mérés során azt tapasztaltuk, a helyiségek között érdemes oldalazva áthaladni, a küszöbön akár meg is állva egy pillanatra.
A pontfelhő (elő)feldolgozására a gyártó által biztosított SLAM GO POST irodai szoftverben van lehetőség. Kezelése végtelenül egyszerű, a felület jól áttekinthető, a munkafolyamat könnyedén paraméterezhető. Tulajdonképpen egyetlen célja, hogy minél előbb színezett, szűrt pontfelhőt állítsunk elő vele, majd azt LAS formátumba kiírva „átadjuk” további feldolgozásra (pl.: nagy pontosságú georeferálás, vektoros kiértékelés, térháló generálás, esetleg modellezés) egy 3rd party alkalmazásnak.
Többféle szűrés is beállítható, a mérés jellegétől függően érdemes választani közülük. Beltérben például a szigorú algoritmus hajlamos a trajektóriánkhoz túl közel eső objektumokból (pl.: falak, padló) szabályos geometriai mintákat „kiharapni”, míg kültérben ugyanez a filter kifejezetten jót tesz a pontfelhőnknek. Mivel a munkafájlok redundánsak és egymásra épülnek, semmi nem vész el, tehát a folyamat során bármikor vissza lehet lépni egy lépést és másfajta szűrési módszert választani. Így a feldolgozás ökölszabályai viszonylag gyorsan kialakíthatóak.
A kézi szkenner a körülöttünk lévő térből felépülő pontfelhőt automatikusan, valós időben már a terepen illeszti, amit az irodai alkalmazás újra futtat és pontosít. Az állószkennereknél megszokott relatív regisztráció lépése így itt kimarad a munkafolyamatból.
A kültéri tömbmérésnél kipróbáltam az illesztőpontos észlelést. RTK GNSS vevővel, a CORRIGO hálózat valósidős, 4-konstellációs korrekcióra támaszkodva meghatároztam előre 9 db „kontrollpontot”, majd bemértem néhány jellegzetes részletpontot is. A program érdekes módon csak négyet volt hajlandó felhasználni az illesztőpontjaimból a transzformációhoz. Az ellenőrző részletpontok pontfelhőből lekérdezett koordinátáiban 20-40 cm-es hibákat észleltem. Ezek szerintem a földre letett illesztőpontok lejelölési és meghatározási hibájából, valamint a szkenner pontatlan rájuk helyezéséből adódtak. Éppen ezért nagyobb pontosságigényű feladatoknál érdemes illesztő célpontokat kihelyezni, azokat mérőállomással meghatározni, illetve a pontfelhőben átazonosítva elvégezni az abszolút illesztést.
A mérés közben automatikusan készített kameraképek nem csak a pontfelhő kiszínezését szolgálják, hanem belőlük buborékszerű, félgömb-panorámák is generálhatók. Ilyenkor egy osztott képernyőn ezeket is szemlélhetjük a pontfelhő mellett.
A SLAM GO POST gépigénye egyébként nem túl magas. 3.6 GHz-es i7 processzorral, 32 GB RAM-mal és 4 GB-os videókártyával gyorsan és akadálymentesen teljesít.
Mind a terepi, mind az irodai szoftver, valamint a kéziszkenner firmware frissítése díjmentes és folyamatos. Az éppen aktuálisan megjelenő és letölthető verzióra a mérőrendszer automatikusan figyelmezteti a felhasználóját.
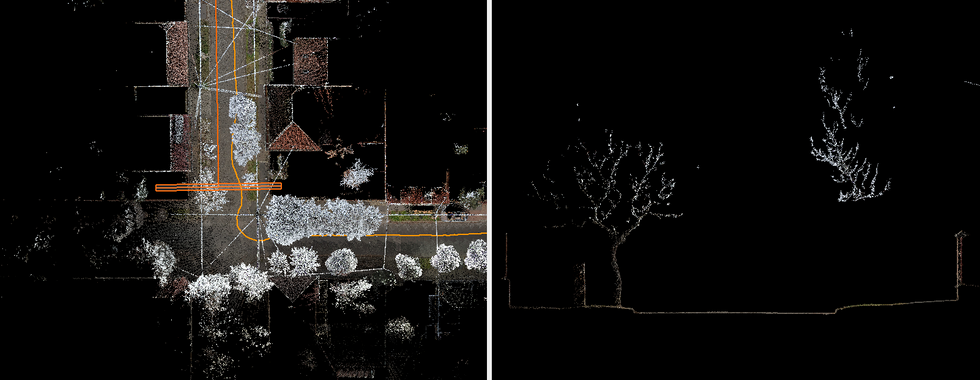
Végezetül adjunk választ arra is, hogy mégis milyenek a FEIMA Robotics SLAM100-zal készült pontfelhők! Ennek minőségét a virtuális térben a falak, burkolatok „vastagságával”, azaz a zajossággal jellemezhetjük jól. Az általunk alkalmazott Trimble Real Works szoftverben azt tapasztaltuk, hogy ahol csak egyszer mentünk végig, ott a vizsgált felületekre felvett keresztszelvényekben ezek kb. 2 cm-re voltak tehetők. Ezek után direkt teszteltük, hogy egy azon projektben, bizonyos szakaszokon nem csak egyszer, hanem többször is végig mentünk. Itt, nyilvánvalóan a többszörös illesztés miatt, a felületek „vastagsága” 3-4 cm-re megnőtt. Szóval sok helyen az tűnt ki, hogy a kevesebb néha több.
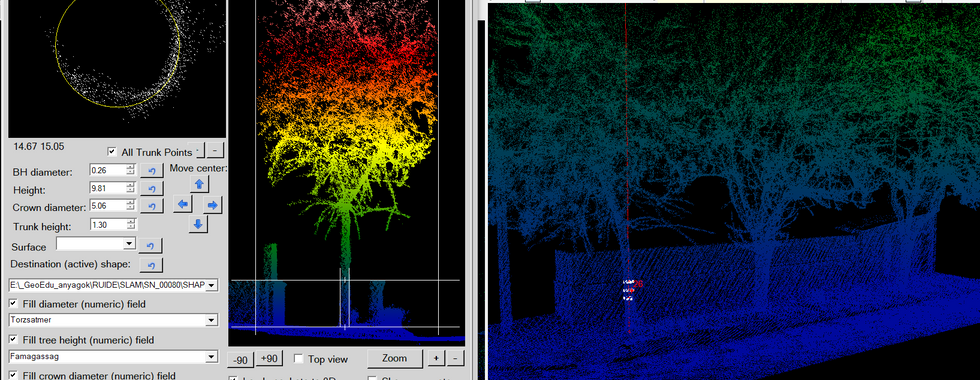
A zajosság és a georferáláshoz szükséges illesztőpontok azonosítási pontatlansága miatt tervezési alaptérkép készítésére nem biztos, hogy jó szívvel merném ajánlani. Ugyanakkor a SLAM100 fenti korlátainak figyelembevételével alaprajz készítésre, tervezés előtti tanulmányterv támogatására, földtömeg számításhoz szükséges észlelésekre, valamint egyéb térinformatikai projektekben kiválóan alkalmazható. Kültéri mérések pontfelhőiből pedig mind a Trimble Business Center-ben, mind a DigiCart-féle Point Cloud Scene alkalmazásban nagyszerű és pontos fakatasztert tudtunk előállítani.
A SLAM100 összességében egy nagyon könnyedén megtanulható és kezelhető, széles felhasználói területtel bíró kézi mobil térképező rendszer, mely nagyon szép és a képviselt technológiához mérten megbízható eredménytermékek előállítására képes.
Kiegészítés:
2023 nyarán újra módom nyílt kipróbálni a SLAM100 egy up-gradelt változatát.
A mérőrendszer kezelése semmiben sem különbözött a korábbiaktól, ám a sorozatos szoftver és firmware frissítések eredményeképpen a feldolgozott pontfelhők jelentős minőségi javuláson mentek keresztül.
Kollégámmal a TSPC Mérnökiroda Kft. Geodéziai Irodáján több munkaterületen is kipróbáltuk, kül- és beltérben egyaránt. A burkolatvastagság, ha nem is egy nagyságrenddel lett vékonyabb, de 3-4 mm-re (!!!) javult. Kiválasztottunk mintahelyszíneket, melyeket Trimble X7 állószkennerrel és a SLAM100 kézi mobil térképező rendszerrel is felmértünk.
Természetesen, referenciaként az állószkenner eredménytermékeit fogadtuk el. Összevetve a két módszerrel készült pontfelhőket, elmondható, hogy kifejezetten jól "ültek egymásra". A legnagyobb általunk feltárt hiba 30, illetve 35 mm volt. Ez jellemzően a lendületesebb mozgással végzett szkennelésre volt igaz, kültéren. Beltérben, lassabb haladás esetén 10-22 mm körüli eltéréseket tapasztaltunk, de nem egy helyen ez lecsökkent mindössze 3-7 mm-re.
Kiegészítés +: 2025 tavaszán ismételten volt lehetőségem kipróbálni a SLAM100 egy újabb up-gradelt változatát. Ezúttal több helyszínen is teszteltük Kollégáimmal és a referencia alapokat egy nagy pontosságú Leica C10 szolgáltatta.
Újfent megállapíthattam, hogy a felhő-felhő, illetve mérőállomással bemért illesztőpontokra történő regisztrációkat követően a két (statikus és dinamikus) szkennelési módszerből származó pontfelhő közötti eltérés mindössze 32-35 mm-re rúgott.
Egyelőre úgy tűnik tehát, ez a SLAM100 esetében ez nem véletlenszerű, hanem egy megismételhető teljesítmény, ami bizakodásra adhat okot a geodéziai (pl: tervezési alaptérkép) felhasználhatóságában.
Engem a fentiek legalábbis elgondolkozásra késztettek. Ezt javaslom eme cikk nyájas olvasóinak is.
Különösen, hogy a kézi szkennerek palettája az elmúlt pár évben szélesre tárult és bizony a SLAM100-nál sokkal olcsóbb eszközök is megjelentek. Ezek megbízhatóságát, használhatóságát viszont tényleg csak hasonló tesztekkel lehetne elfogadni, vagy elvetni szakágunkban.
Ezzel a témával egy másik publikáció foglalkozik részletesen: KLIKK IDE!
Ezúton szeretném megköszönni Forgó Zoltánnak és a FORGEO Kft.-nek lehetőséget biztosított kipróbálására.































Comments